Internet of Things (IoT) is one of the big electronics subjects throughout the world this year.
To show the capabilities of custom IoT devices and to help a local LAN-event organisation, TheBlast, we offered the help to create an Internet enabled soccer table.
Thanks to generous donation by Tuborg Fonden we were able to buy a brand new soccer table for us to modify.
We modified the table by adding two touch displays for user interaction, a barcode scanner for user registration. Inside the table we installed two score detection IR sensors and a ball release system, made by using a motor/wheel from an old Roomba robot. Finally we installed 5 meter of RGB LED strip to light up the playfield.
When scores is detected they are immediately registered online, to be displayed on the LAN-event website, where score timetable and all previous matches can be found.
This post will describe the features of the final table and how it was developed.
It has been quite a while since my last blog post, but I am finally ready to reveal what I have been working on the last months. Ever since I made my first balancing robot: http://blog.tkjelectronics.dk/2012/03/the-balancing-robot/ and the Balanduino I wanted to build myself a full size version which I would be able to ride just like a regular Segway.
Finally I decided to make one together with a good friend of mine Mads Friis Bornebusch in a course at my university DTU (Danish Technical University/Technical University of Denmark).
Video demonstration
Mechanical construction
The main frame is an aluminium checker plate that is 500x360x7mm which the motors are bolted onto. This width was chosen, so it would be able to go through a normal door opening. The motors used are two MY1020Z 500W, 24V, 12.6Nm brushed DC motors.
I ordered them from Germany, as I needed them right away, but you should be able to get them much cheaper by ordering them directly from China.
Below is an image of the aluminium checker plate after we have drilled the holes for the 8mm steel bolts. Note that these are countersunk, so they are flush with the surface. I would recommend using lock nuts to ensure that the bolts will stay in place – you can also use Loctite instead.
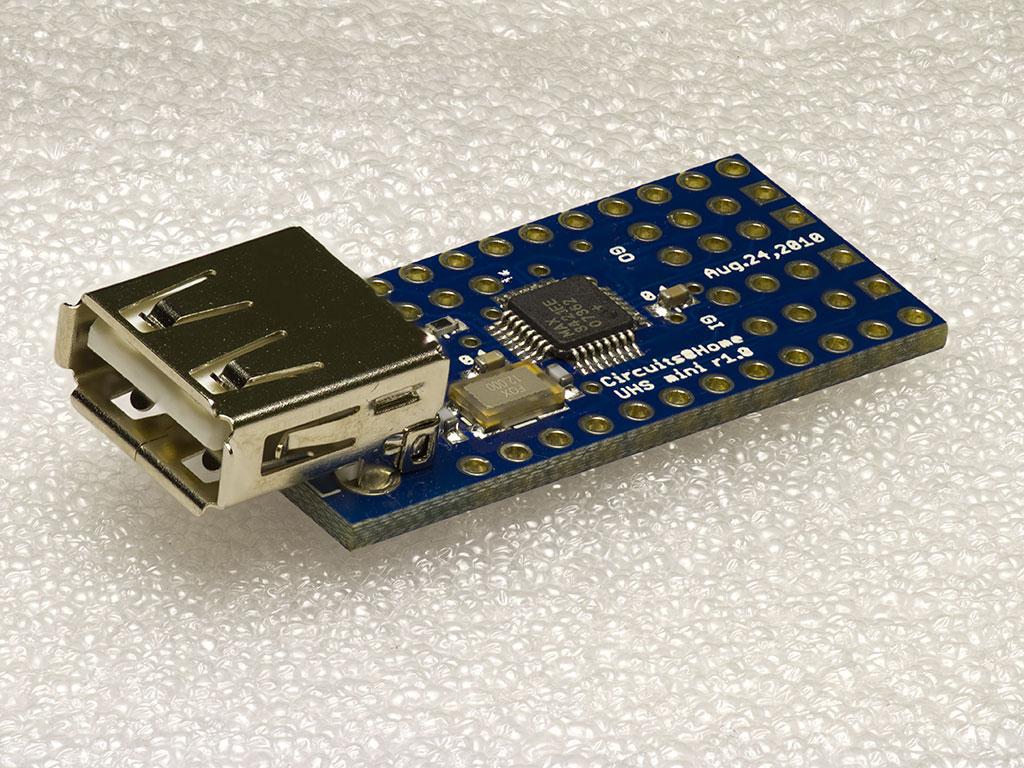
After some great success with the USB Host shield development and the sales of the USB Host shield for Arduino thru our webshop, we are happy to announce that we have also started carrying the compact version of the shield, the USB Host Shield for Arduino Pro Mini.
USB Host Shield for Arduino Pro Mini
The shield is just a compact version of the well known USB Host shield for Arduino’s and it makes you able to add the USB Host functionality such as Bluetooth control with PS3, Wii or your Android phone, to any Arduino Pro Mini equipped projects. Please note that your Arduino Pro Mini must be running 3.3V though!
We will be selling the mini shield at an introductory price of $20.00 USD and it can be bought including pre-cut headers for stacking.
A lot of you probably both know the STM32 devices maybe even from our blog as we tend to use it a lot. You probably also know the mbed board that started as an NXP LPC1768 equipped microprocessor development DIP-like module.
Now ST Microelectronics has decided to join the adventure of the mbed world by making their own mbed development board series and adding support for 4 different STM32 devices in the mbed online compiler environment!
We are happy to announce a new contributor and hopefully soon consultant at TKJ Electronics, Diego Ayala.
I have been in touch with Diego for quite a while and we have been talking about his experience with the STM32 family and other ARM M0, M1 and M4 cores together with the Keil and CooCox IDE’s. So an experience like his is really usefull for ARM embedded projects.
To display some of his work we decided to go thru one of his recent projects, a color tracking device running on the STM32F103. A project that really displays what the ARM Cortex-M3 device is capable of doing, as long as you optimize well enough.
It has been quite a while ago since my last post here at the Blog which is due to a lot of new things and changes that happened in the past year. So with the following post I would like to tell a bit about myself and why I haven’t been writing post so frequently.
“Who am I?”
Most of you probably don’t know a lot about either me or Kristian, but I thought it would be the right time now to give a better introduction about me and myself. I have mainly been keeping these details about myself private, due to my age and the difficulty in freelance work and consultancy when being a newly started company and now with an age of only 20 years.
“My name is Thomas Kølbæk Jespersen. I’m 20 years old and a keen electronics enthusiast, entrepreneur, R&D ‘engineer’ and now being a student at Aalborg University studying Electronics Engineering.”
A lot of things happened for me and my company TKJ Electronics in the past year, which are but not limited to:
I am very pleased to announce that I have now added support for the PS4 controller via Bluetooth. This will allow you to read all the buttons and joysticks with the same API as all the other libraries I have written for the USB Host library.
To get started you should look at the provided example. It shows how to read the different buttons and joysticks. I still haven’t figured out how to control the light, rumble and read the accelerometer, gyroscope and touchpad, but hopefully I will figure that out soon. Read more…
I am glad to announce that Bluetooth HID devices are now supported by the USB Host library. The library already supports PS3 and Wiimote controllers, but now it also supports more general devices, like Bluetooth keyboard and mice.
First time you run the code, you will have to pair with your device, this is done by creating the instance like so:
BTHID bthid(&Btd, PAIR, "0000");
You can of course set the pin to anything you like.
Now you should enable discovery of your device and it should automatically detect any mouse or keyboard present and then connect to them. On Bluetooth mice there is no need to enter any pin, but on a keyboard you should enter the pin on the keyboard and then afterwards press enter.
So in this example you should press 0 four times on the keyboard and then press enter afterwards.
After you have paired with the device, you can simply create the instance like so:
BTHID bthid(&Btd);
When you press any button on your device it will automatically connect to the last paired device i.e. your Arduino. Read more…
I have finally finished my last exams, so now I have more time to focus on some of my own projects. It has been a while since our Kickstarter campaign was successfully funded, but we are still working on making the experience better for the final users.
After the campaign ended we sent out a survey to all our backers with several questions about there address, profession and so on, but we also asked them if they had any suggestions for improvements or extra features they would like to see added to the Balanduino. A lot of people asked if we could enable wireless streaming for it.
I was personally very excited about that since I have been playing with the thought for quite a while, so when the official camera module for the Raspberry Pi became available I bought it straight away.
We are very pleased to announce that our Kickstarter for the Balanduino balancing robot has successfully been funded by $13,494 which we are very happy about.
We have just received stickers from our printing company and have decided to give a little bonus in form of a signed Balanduino post card. We will be shipping this post card and stickers to all of our backers who have pledged $10 or more, within next week.








Recent Comments